The parameterized profile definition defines a 2D position coordinate system to which the parameters of the different profiles relate to. All profiles are defined centric to the origin of the position coordinate system, or more specific, the origin [0.,0.] shall be in the center of the bounding box of the profile. (Definition from ISO/CD 16739:2011)
More...
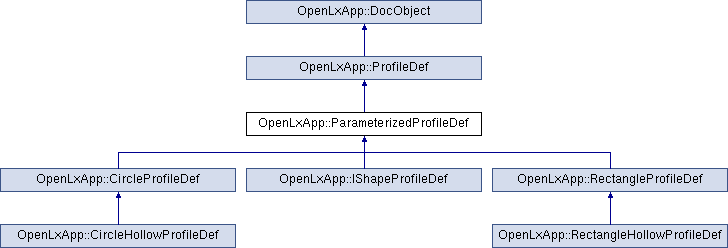
#include <ParameterizedProfileDef.h>
The parameterized profile definition defines a 2D position coordinate system to which the parameters of the different profiles relate to. All profiles are defined centric to the origin of the position coordinate system, or more specific, the origin [0.,0.] shall be in the center of the bounding box of the profile. (Definition from ISO/CD 16739:2011)
- See also
- Documentation from IFC4: IfcParameterizedProfileDef
◆ ~ParameterizedProfileDef()
| virtual OpenLxApp::ParameterizedProfileDef::~ParameterizedProfileDef |
( |
void |
| ) |
|
|
virtual |
◆ ParameterizedProfileDef()
| OpenLxApp::ParameterizedProfileDef::ParameterizedProfileDef |
( |
void |
| ) |
|
|
inlineprotected |
◆ getPosition()
| Geom::Ax22d OpenLxApp::ParameterizedProfileDef::getPosition |
( |
| ) |
const |
◆ setPosition()
| void OpenLxApp::ParameterizedProfileDef::setPosition |
( |
const Geom::Ax22d & |
aValue | ) |
|
The documentation for this class was generated from the following file:
 Public Member Functions inherited from OpenLxApp::ProfileDef
Public Member Functions inherited from OpenLxApp::ProfileDef